金钻衡器:检重秤,滚筒秤厂家
- 立足于衡器领域
- 汇聚衡器行业人才研发制造
- 专注检重秤,滚筒秤研发15余年
全国免费咨询热线
13771944346
全国免费咨询热线
13771944346
热门关键词: 检重秤 、 滚筒秤 、 重量检测机 、 在线检重秤
 来源:金钻称重浏览:发布日期:2021-07-01
来源:金钻称重浏览:发布日期:2021-07-01
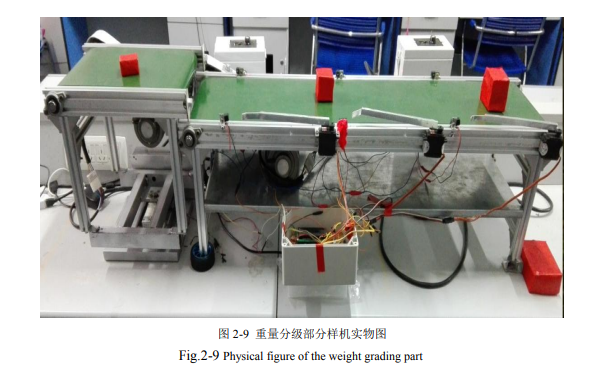
该鸡翅重量分级装备工作原理简单的说就是通过单片机检测称重传感器传送的信号,对该信号进行判断处理,分出重量等级来,进而控制下游的相应重量等级的舵机发生转动。样机实物图如图2-9所示,工人将鸡翅一个一个的放到格式传动带上的一个小格子中,在拨轮的拨动下,被拨到了过渡传动带上。格式传动带的目的就是为了保证每两个鸡翅之间的距离,防止因距离太近而发生一个机械臂同时将两个鸡翅扫入到一个临时储物箱中的情况。同时,也是可以起到定时定量的工作效果,如果想提高工作效率就可以加快格式传动带的传动速度。
过渡传动带在这里是起到一个过渡作用,减小从格式传动带上掉落的鸡翅直接落在称重传动带上而带来的冲击,该冲击对测量重量的准确性干扰太大。同时也是为了使鸡翅的运动速度与称重传动带的速度一致,好让鸡翅在运输的过程中自然的以相同的速度过渡到传动带上,便于称重传动带的称量。当有鸡翅通过过渡传动带运输到称重传动带上时,电阻应变片压力称重传感器在鸡翅的压力之下而发生形变,通过桥式电路将电阻的变化转化为电压的变化,再通过HX71IAD模块中的放大电路,滤波电路将该电压信号放大,过滤。然后再经过AD转化电路将电压信号转化为数字信号,单片机再对该数字信号进行判断处理,经过程序运算,平均值滤波将鸡趣的实际重量计算出来,显示在1602液晶显示屏上。此时,单片机会对该重量进行判断分析,判断它是属于哪一个重量区间,下一步就是检测该鸡翅是否运动到该重量区间的机械臂扫动范围内。如果,运动到正确的位置,单片机会控制舵机转动,完成分级。
鸡翅继续运动到分级传动带上,当有鸡翅挡住对射式光电开关的红外线传播路线时,信号端口会由高电平变为低电平。此时如果单片机检测到的鸡翅重量是该对射式光电开关所对应的重量等级时,单片机会控制该舵机向右转动45转回原来位置,在舵机转动的同时带动它上面的机械臂转动,从而将鸡翅扫落到相对应的临时储物箱中。该重量信号与光码开关的低电平信号构成一个与运算,即二者同时成立时,才会发出舵机转动的命令
如果该鸡翅重量不是第一个光码开关处的重量等级的,鸡翅会继续运动。直到运动到与它自身重量相匹配的重量区间处的光码开关处时,该光码开关的信号端会从高电平变为低电平,单片机就会控制第二个舵机转动。同理,如果该鸡翅重量不是第二个重量等级区间的,那么鸡翅会继续运动,直到运动到与它自身重量相匹配的区间处,在光码开关的信号指引下,舵机转动完成分级。图2-9所示是该装备重量分级部分样机实物图。
上一篇:鸡翅分级秤的基本原理及构成部分
下一篇:分级机称重传感器如何选?
【责任编辑】: 版权所有:/转载请注明出处


